Within performance arts, technology functions as a catalyst and has been incorporated with dance performances through sound, imagery and sensors. There has been considerable research into the explorations of representing movements in dance. Most of these research have devoted efforts to realistic real-time movement simulation or animation in software interfaces from motion tracking, machine learning to augmented reality, which are primarily intended to increase choreography creativity, group coordination, or reduce the learning barriers. These projects use realistic simulations, stick figure visualizations to help choreographers to design the movement patterns, or the novices to follow the motion sequences.
Dance can be performed again, but this repetition itself marks it as different--Peggy Phelan.
The body expresses choreography only in the passing moments. Even though dancers remember every movement, the form and energy expressed through each performance can be subtly different. capturing the dancer’s dynamics or the emotional dimension of the movement and conveying the subtleties of the personal style is challenging - especially when one is limited to keyframes or single state notations.
How can digital media materialize and preserve the intangible expressions of the body movement? How can we preserve this kinetic information for dancers to appreciate the subtle differences and for novices to learn in a reflective way?
The project aims to use movement data as a design material to explore the design space between the body expressions, computational design and digital fabrication
1. MOVEMENT TRACKING
I worked with a friend who dances Chinese folk dance; She prepared a 20-second dance and moved in repetition.
Two accelerometers are attched to the two arms of the dancer to log the movement data every 500ms.

Records the dancer's movement
set up of the motion capture
Three types of data can be captured:
- the calibrated acceleration values on each axis in m/s^2 on the serial interface.
- the gravitational acceleration values between -1g to 1g.
- the inclination angles around each axis
2. SEMANTIC MAPPING
I build on Hansen & Morrison’s “Movement Schema” for identifying semantic properties of movement dynamics, in which velocity, position, repetition and frequency are identified as the core modalities.
To visualize the movement qualities with the 3 sets of the registered acceleration data, I created a network of choices for mapping the semantic properties of the dynamics of movement in the data.
The Semantic Mapping of the Four Movement Qualities
1. Towards Discrete Aggregation
This computational design system is an aggregation of discrete unit elements with multiple different scales and a limited number of connection possibilities that can cross-connect repetitively.
My initial experiment with the discrete aggregation was to work with 2D ellipses. Each unit ellipse is a container for the informtion of the corresponding data point. Discrete unit ellipses are transformed in sizes and orientations according to its corresponding data point and aggregated based on their positional relationship to the previous ellipse.
Generative Process of the Unit Geometry Aggregation
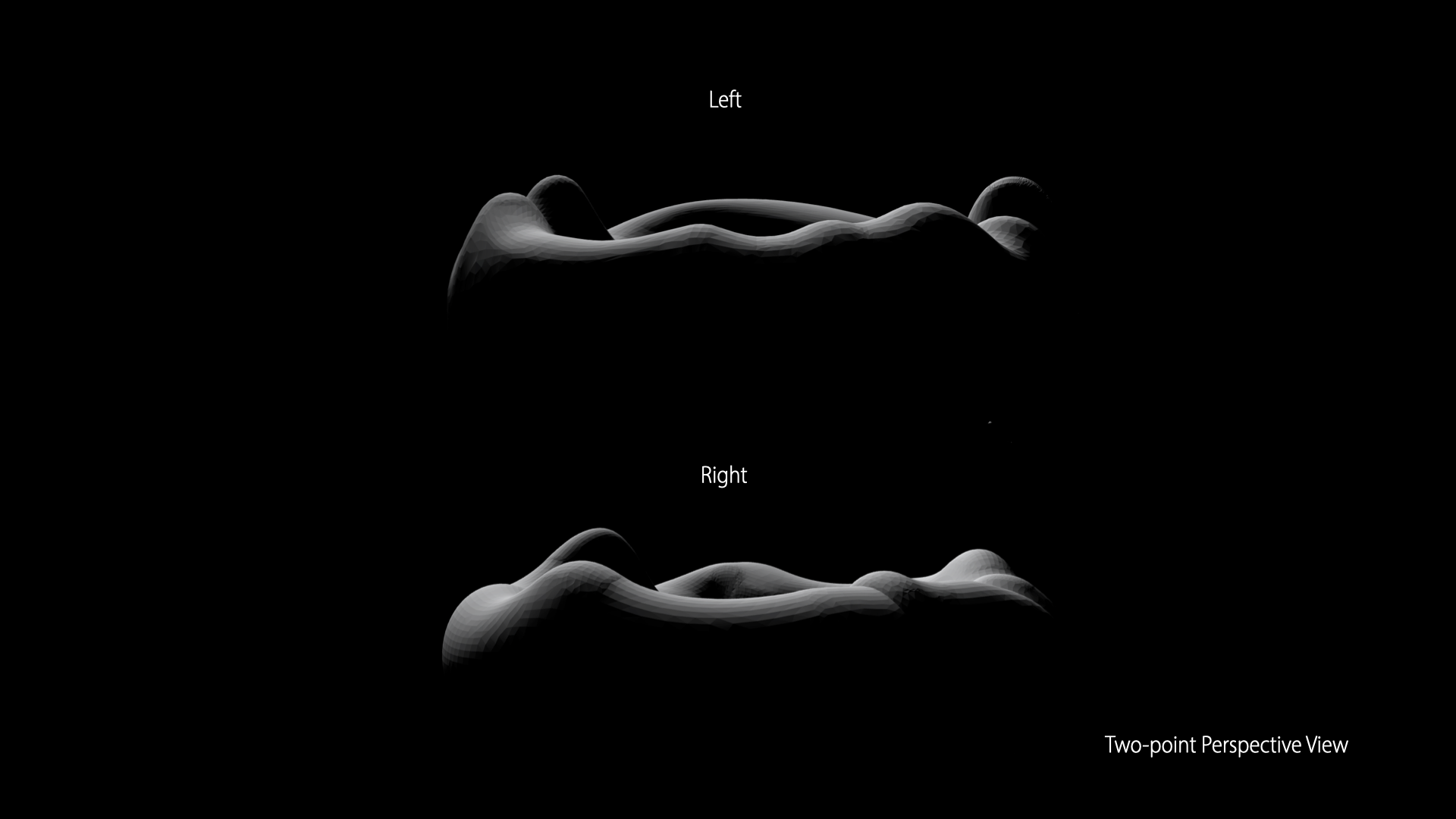
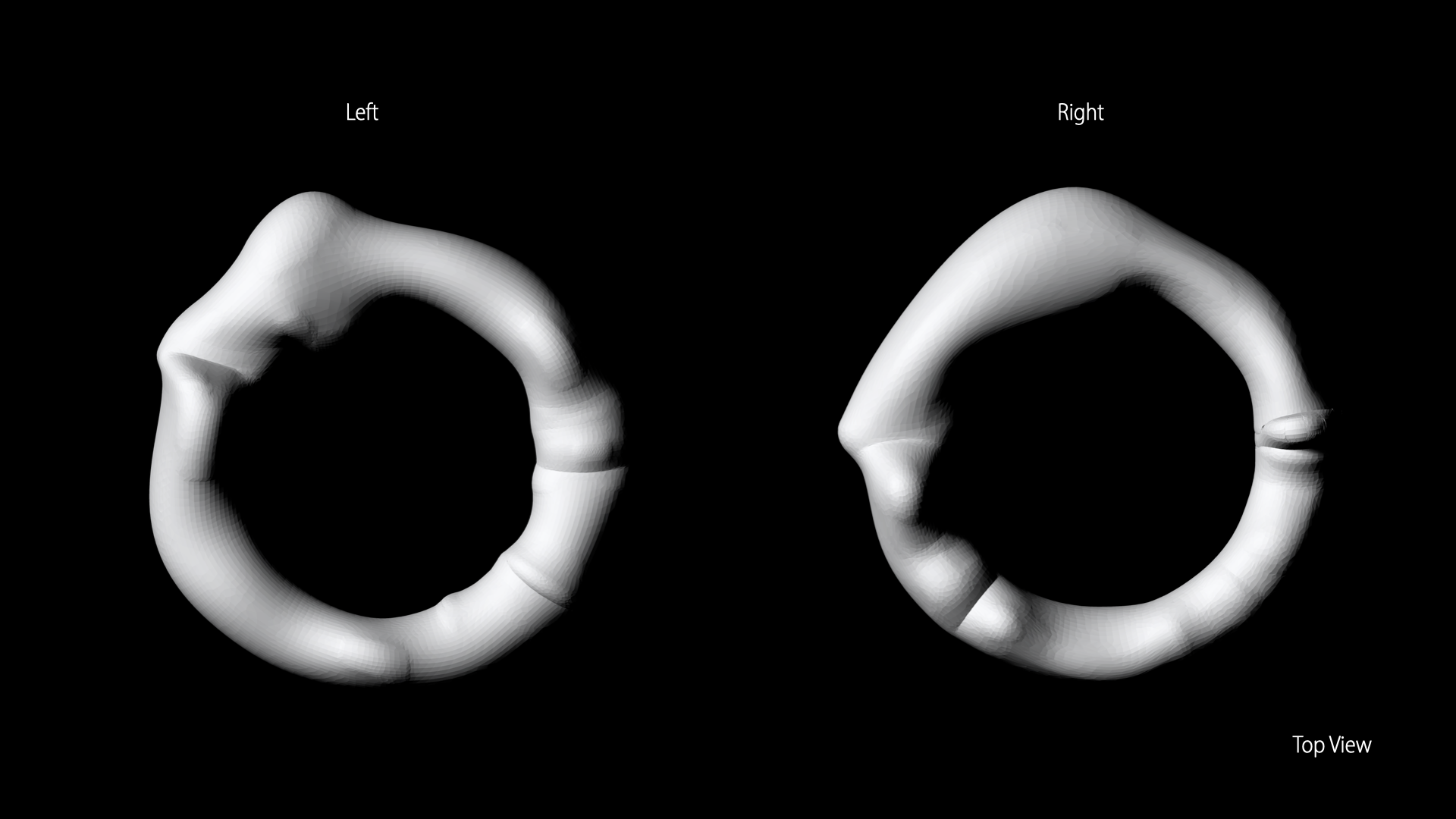
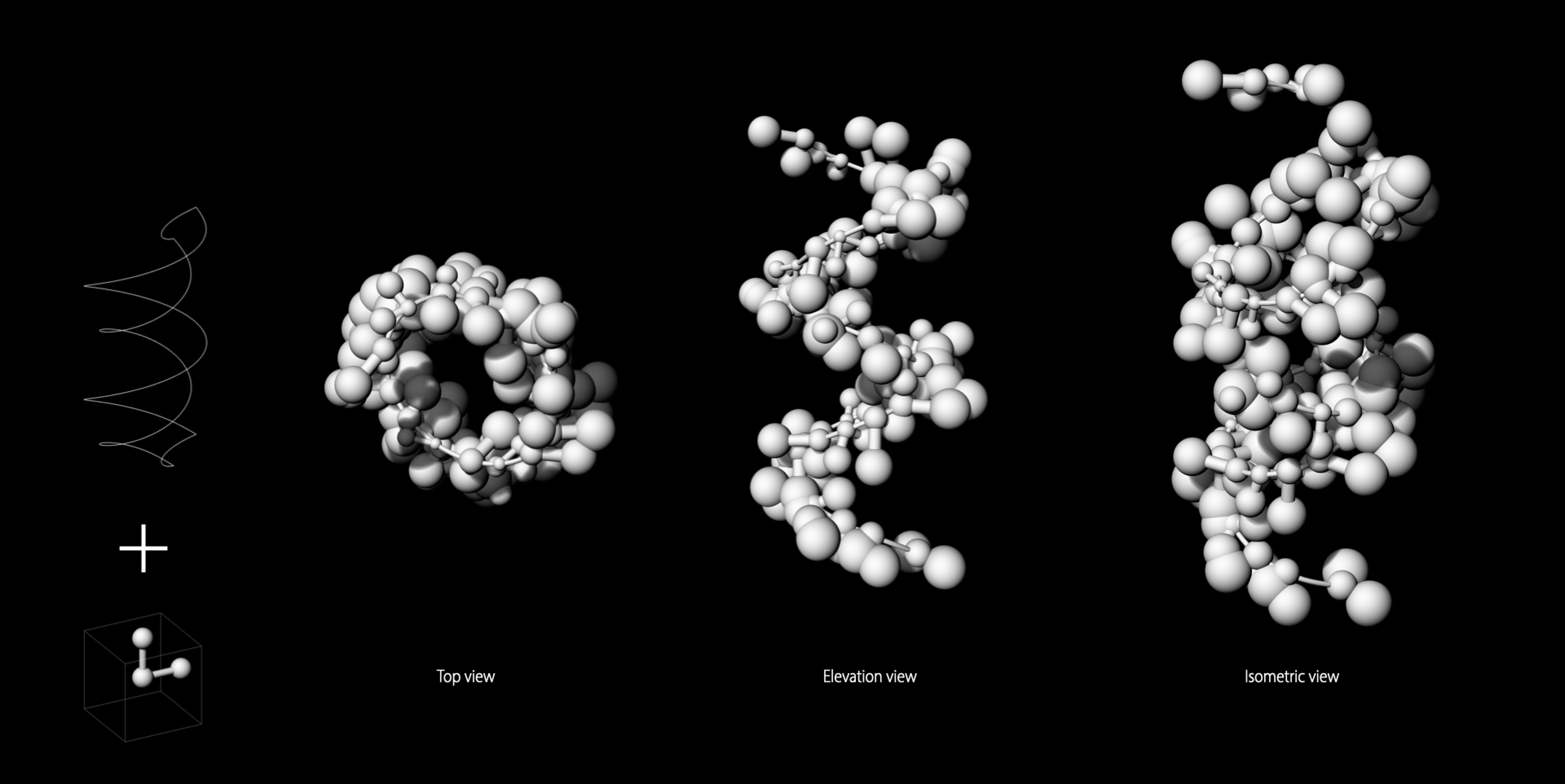
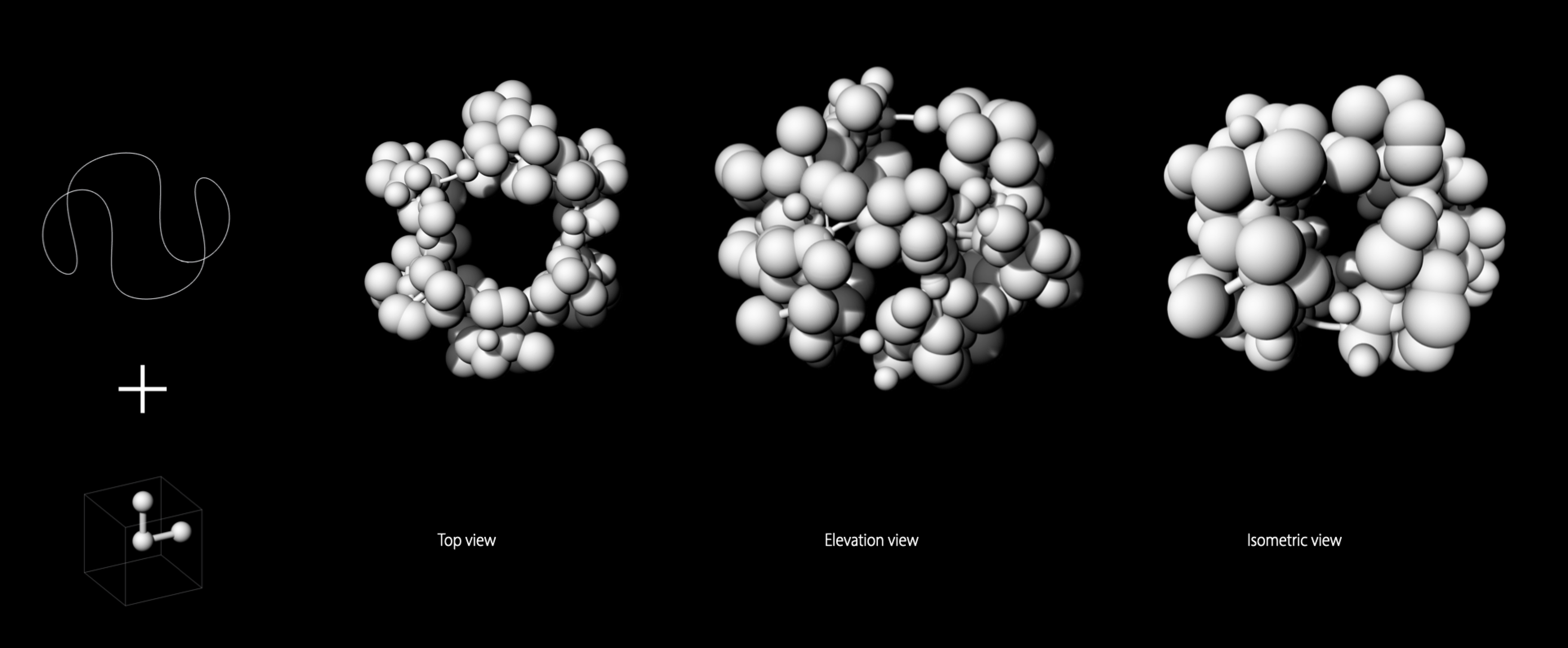
Rendered Views
2. Unit Component: From 2D To 3D
Working with 2D shapes is limited in shape transformation. This led me to experiment with 3D shapes that embrace more transformation possibilities and can be aggregated directly without causing fabrication challenges.
I referred back to Laban’s skeleton-like notation system and Kandinsky’s line drawings abstracted from the body movement, and redesigned the unit component that is composed of lines and points to resemble the transformation of the body shapes.
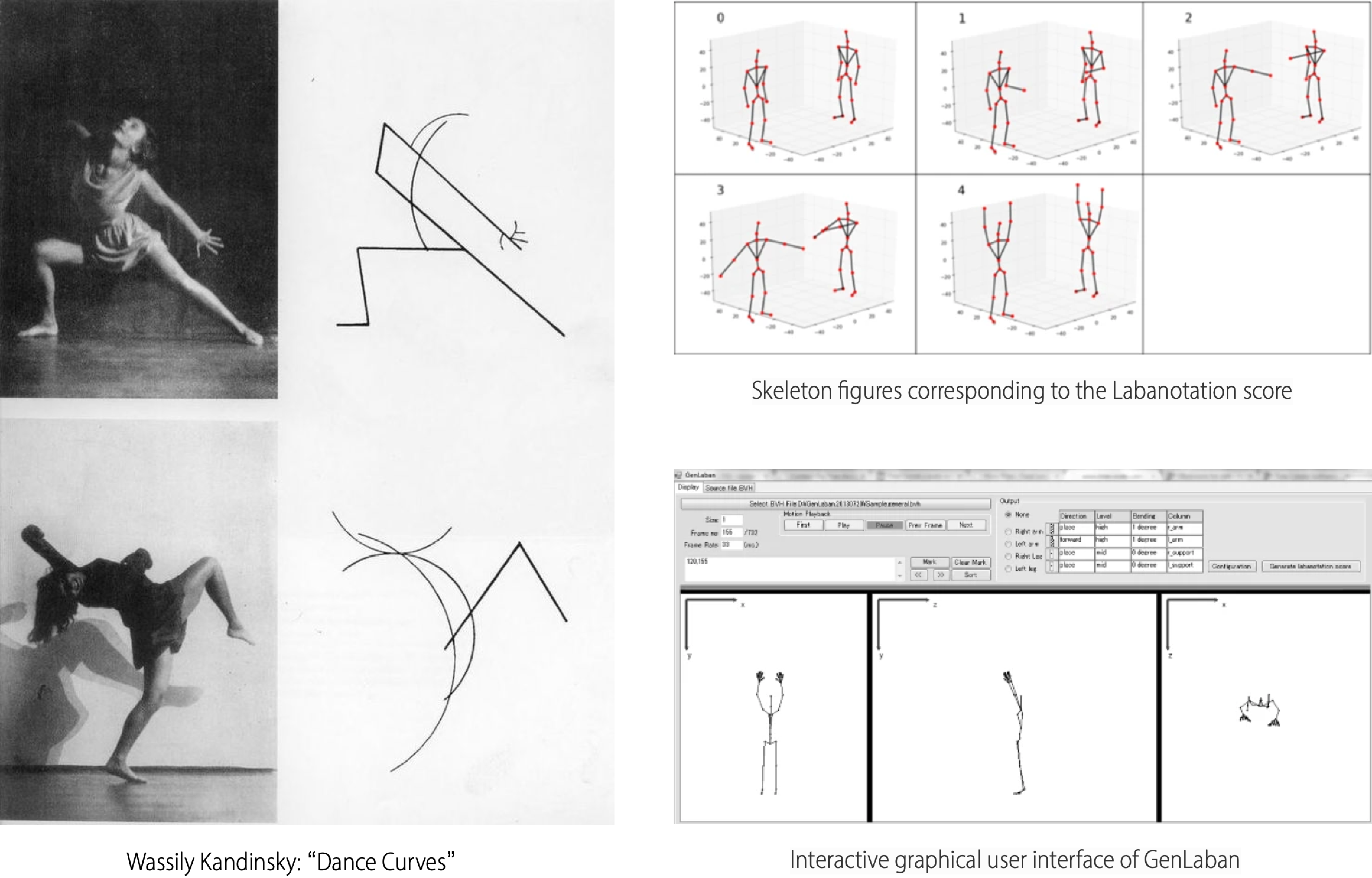
Style Reference of The Unit Component
The central sphere represents the center of the body mass, which changes when the dancer moves. The branched sphere represents the movement of the body parts which are being tracked with the sensors. This enables the flexibility to generate many design variants based on how many body parts are being tracked, where the body center is, and how the tracked body parts are oriented.
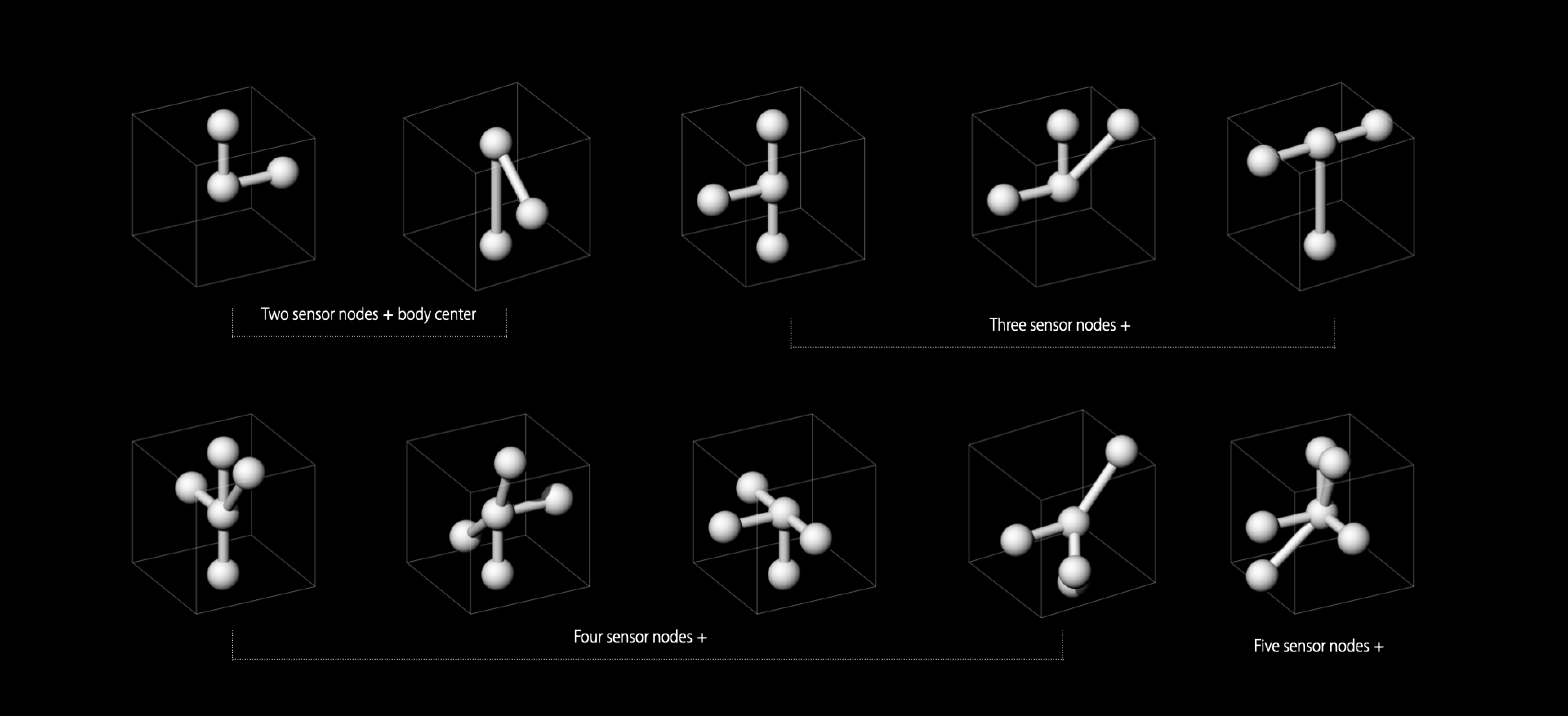
Design Variations Of The Unit Geometry

Evolving Process Of The Unit Geometry Aggregation
Design Variations Of The Aggregations With Different Performance Duration
3. Spatial Curves: The Language Of The Space
Although the circular trail is good to indicate the animation cycle, but it is limited in showing the movement flow in space.
Taking inspiration from Laban’s idea of kinesphere, which uses body as reference point in space, and William Forsythe’s space-tracing notation, a variety of spatial curves can be generated by tracking the primary locations in space where the dancer passes by.
Style Reference of The Spatial Curve
The simulation of the movement flow starts with a bounding box as the unit space wherein the dancer can move. The dance itself forms the spatial curves by connecting the “anchor points” on the surfaces of one unit box or the aggregated multiple boxes
Generative Process Of The Spatial Curve
Design Variations Of The Spatial Curves
This further results in the design varitions that illustrate the unit building block transformation in the time-space dimension corresponding to the meaning of the digital data obtained from the dancer's movement.
The Two Design Variations Of The aggregation along the different spatial curves with the same dataset
4. Fabrication
Iterations of the design models were exported from Rhino and sent to the 3D printer for printing.

Final printed models
1. Algorithm Optimization
2. System Optimization